Assistant Professor Fei Miao’s Career award, titled “Distributionally Robust Learning, Control, and Benefits Analysis  of Information Sharing for Connected and Autonomous Vehicles” brings the concept of self-driving cars one step closer to reality. While the science behind autonomous vehicles is extremely technical, the goal is quite simple: to create a system of connected auto cars that is safer and more efficient than current vehicles on the road today. Dr. Miao, whose research focus lies in building the foundations for the science of learning and control of cyber-physical systems to assure safety, efficiency and security for the application areas such as connected autonomous vehicles, intelligent transportation systems and smart cities, plans to do just that.
of Information Sharing for Connected and Autonomous Vehicles” brings the concept of self-driving cars one step closer to reality. While the science behind autonomous vehicles is extremely technical, the goal is quite simple: to create a system of connected auto cars that is safer and more efficient than current vehicles on the road today. Dr. Miao, whose research focus lies in building the foundations for the science of learning and control of cyber-physical systems to assure safety, efficiency and security for the application areas such as connected autonomous vehicles, intelligent transportation systems and smart cities, plans to do just that.
The rapid evolution of ubiquitous sensing, communication, and computation technologies has contributed to the revolution of cyber-physical systems (CPS). Learning-based methodologies are integrated to the control of physical systems and demonstrating impressive performance in many CPS domains and connected and autonomous vehicles (CAVs) system is one such example with the development of vehicle-to-everything communication technologies.
There are still a lot of challenges. To guarantee the safety of a “self-driving car” and the efficiency of the CAVs systems is not as simple as previously thought in a complicated and dynamic mixed traffic environment. “We need new theoretical foundations about how to connect vehicles, how to better integrate the strength of learning and control methodologies to utilize shared information to help the car recognize the environment,” says Miao. “Then it can make decisions on what action to take.”
The main challenges to be solved include (1) how to model dynamic system state and state uncertainties with shared information, (2) how to make robust learning and control decisions under model uncertainties, (3) how to integrate learning and control to guarantee the safety of networked CPS, and (4) how to quantify the benefits of communication.
To address these challenges, Dr. Miao’s CAREER proposal aims to design integrated communication, learning, and control rules that are robust to hybrid system model uncertainties for safe operation and system efficiency of CAVs.
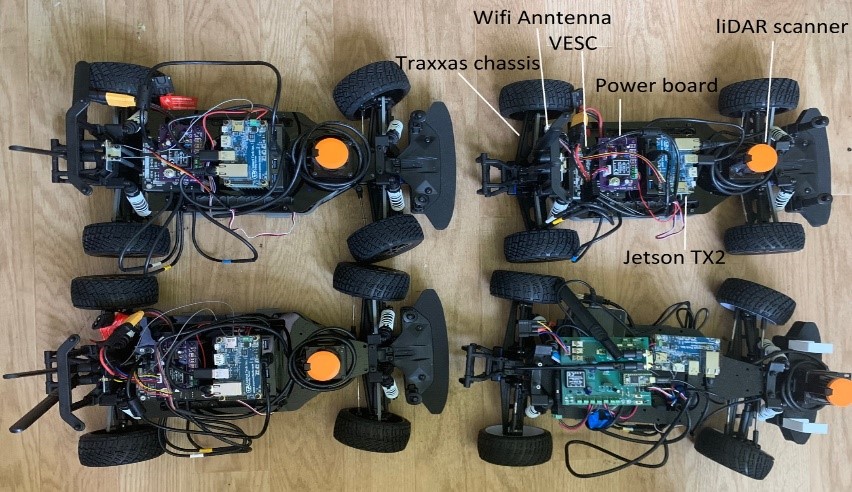
The fundamental theory and algorithm principles will be validated using simulators, small-scale testbeds and field demonstrations to form a new framework for future connectivity, learning, and control of CAVs and networked CPS. Dr. Miao’s fleet of racing cars will eventually lead to full scale cars to demonstrate car-to-car and car-to-road communication. “This integrates the strengths of both learning and control to improve system safety and efficiency,” says Dr. Miao.
Visit Dr. Miao’s website to learn more about her research: http://feimiao.org/